1 x 65″ curved monitor (front) en 2 x 32″ links en rechts dienen voor de views. We krijgen zo een zicht van meer dan 180º.
1 x 65″ curved monitor (front) and 2 x 32″ monitors on the left and right side represent the views. This allows a total view of over 180º.
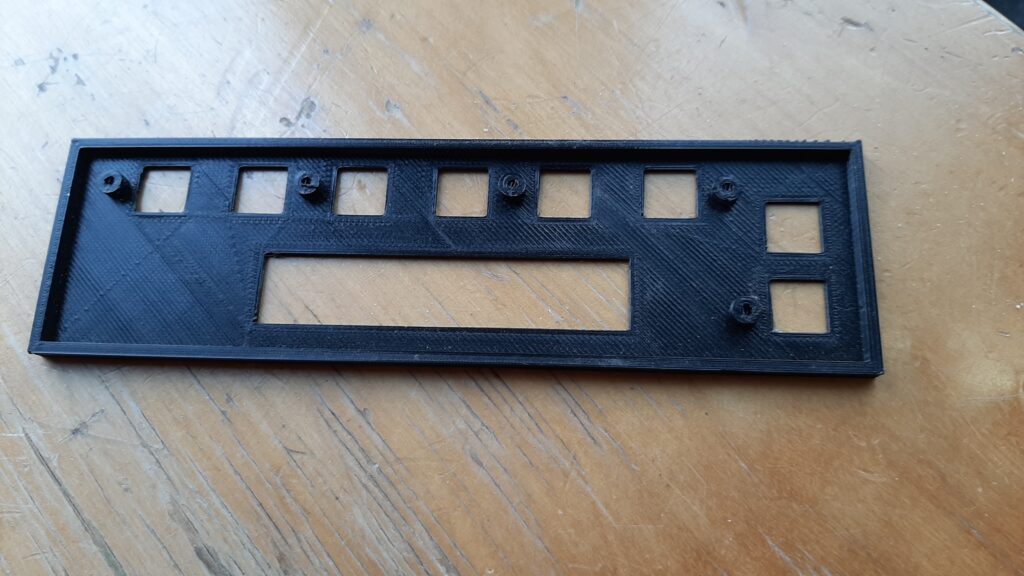
De radio van de simulator bestaat uit audio paneel, auto pilot, com/nav en de transponder waarvan de frames gemaakt zijn met een 3D printer. Alleen de GPS is aangekochte hardware.
The radio of the simulator contains an audio panel, auto pilot, com/nav and a transponder, the frames are made with a 3D printer. All home made, except for the GPS.
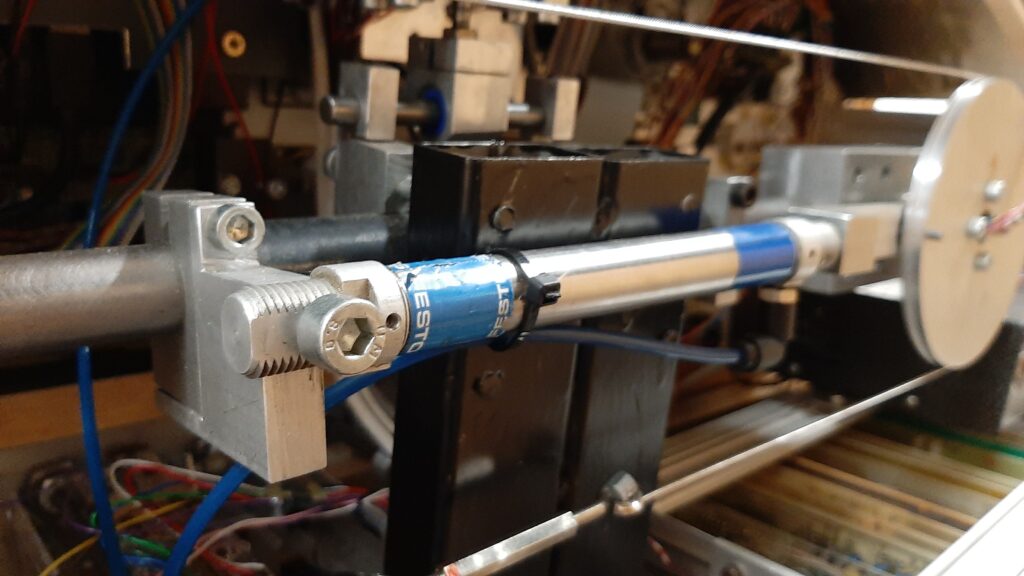
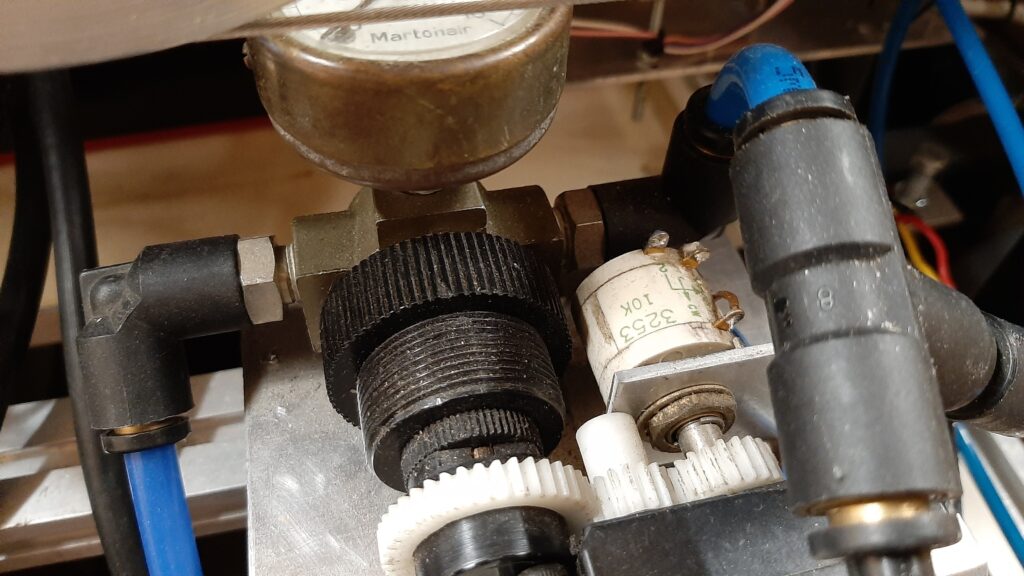
Zowel de yoke als de voetpedalen werken via force feedback. De luchtdruk wordt geregeld naargelang de snelheid van het vliegtuig, zo krijgt men dezelfde beleving als tijdens het echte vliegen.
Both the yoke and the rudder paddles work with force feedback. The air pressure is controlled depending on the speed you are flying at. The feeling is just the same as in a real airplane.


Er worden 2 computers gebruikt: 1 voor de simulatie zelf en de andere waar FSUIPC op draait en zo ook de software welke in programmeertaal C is geschreven voor de controle.
2 computers are used: 1 for the simulator itself and the other one for running FSUIPC and the controlling software which is written in the programming language of C.

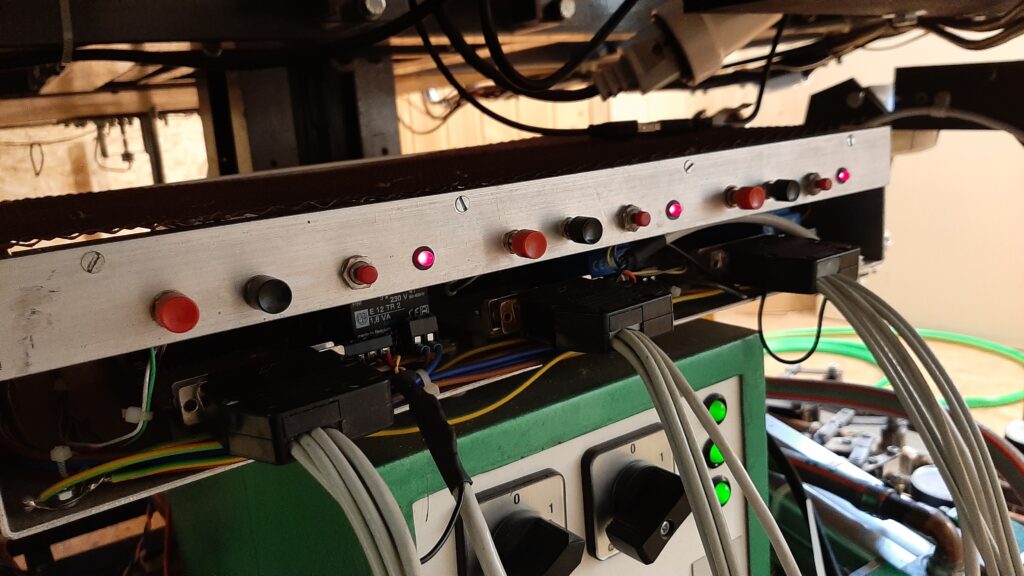
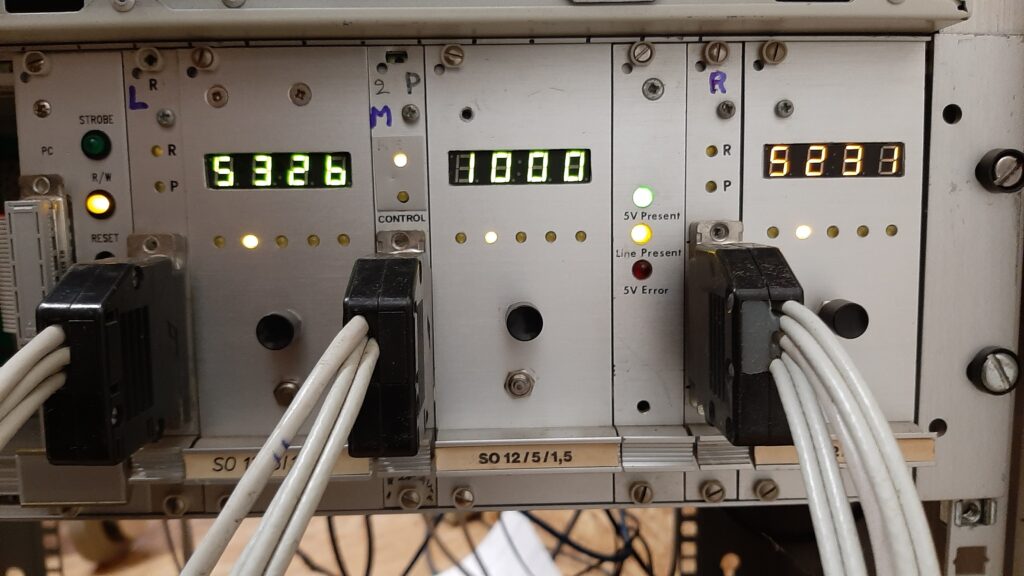
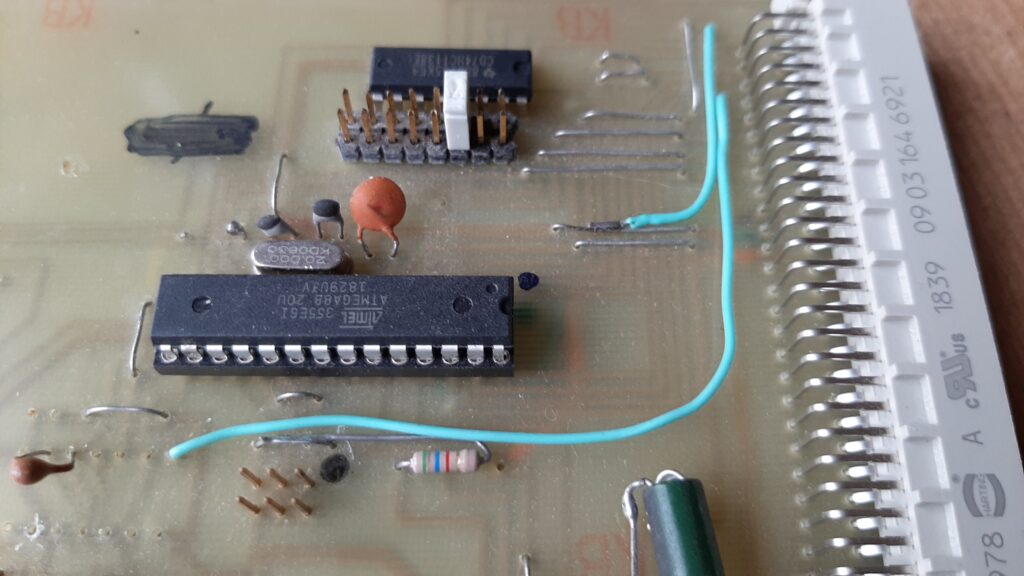
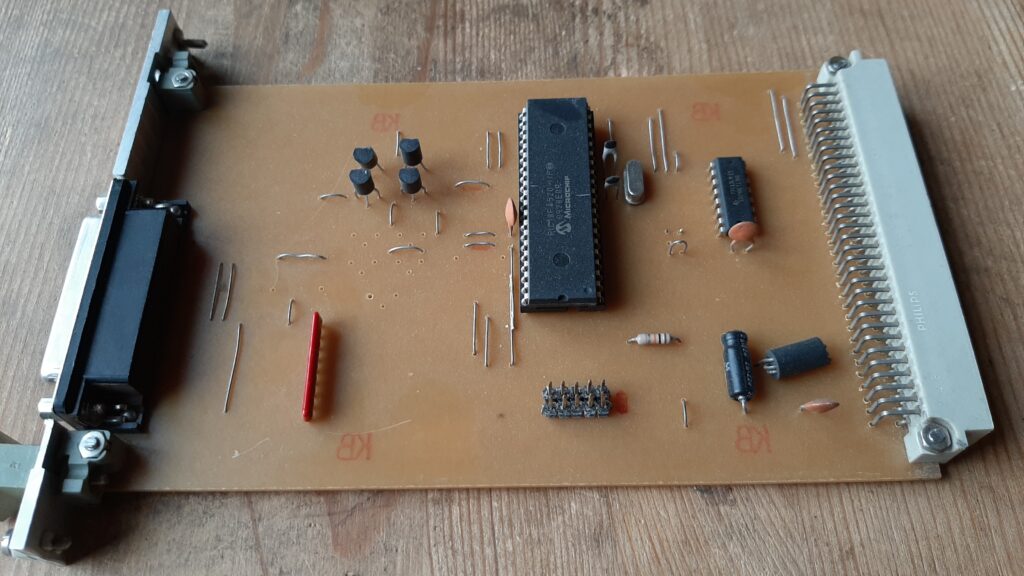
Via een BUS systeem worden al de modules (PCBs) aangestuurd. Zo goed als al de kaarten hebben hun eigen microcontroller.
Using a BUS system all modules (PCBs) are controlled. Nearly all of the cards have their own micro controller.
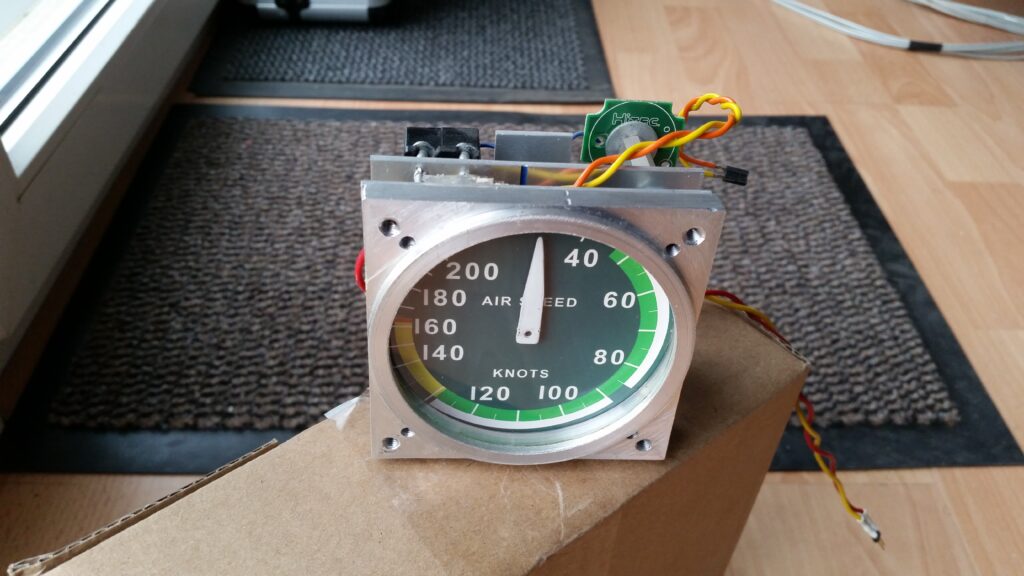
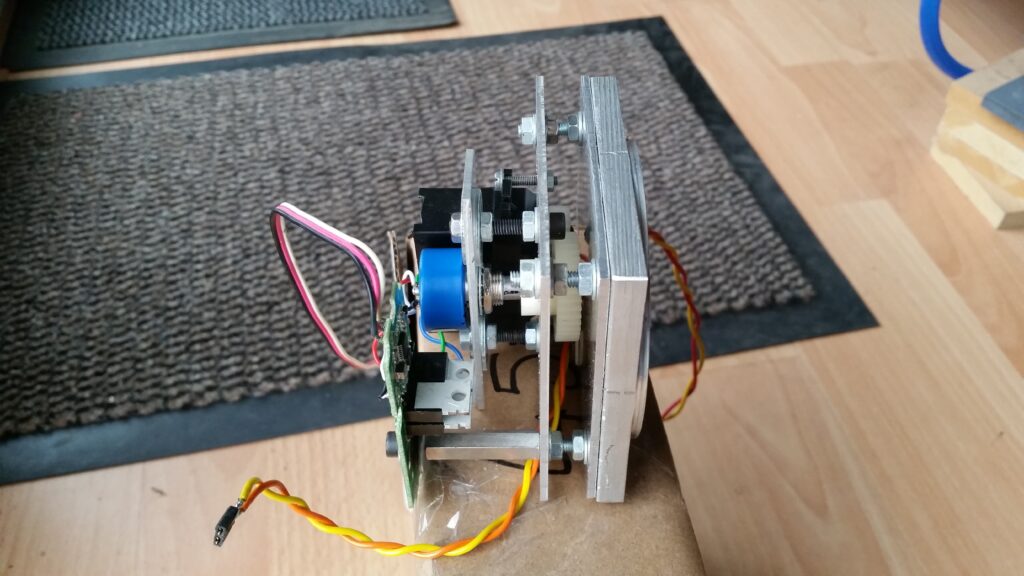

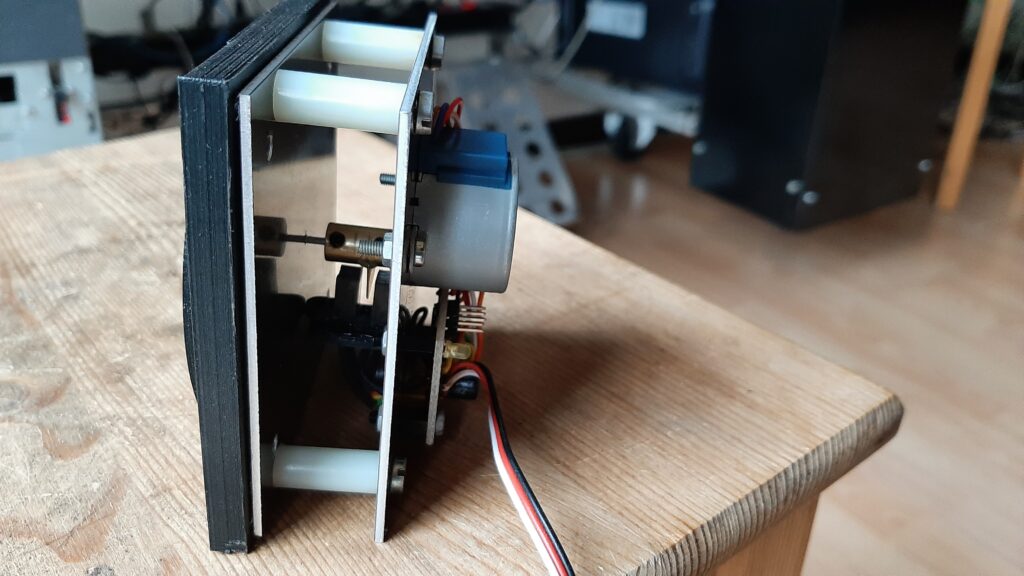
Meer dan 10 jaar geleden was het nog niet mogelijk om thuis onderdelen te maken met behulp van een 3D-printer. Het frame van een van de meetinstrumenten werd toen gemaakt van aluminium bijvoorbeeld.
More than 10 years ago it was not possible to make parts yourself with a 3D printer at home. The frame of on the gauges for example was made of aluminum.
MOTION.
Hoe ga ik, pakweg 2 personen (2 x 80kg) èn een frame van meer dan 150kg vlot, zonder schokken, snel en nauwkeurig genoeg laten bewegen? Dit was een heel groot vraagstuk.
Er waren verschillende mogelijkheden: Hydraulica ging niet, dit was te duur en ik had er geen persoonlijke ervaring mee. Pneumatica was een andere optie, dit systeem is zeker sterk genoeg, maar veel te langzaam.
Elektrische aansturing was ook nog een mogelijkheid – met zware transmissie kasten zou het wel lukken – maar ook deze optie zou weer heel duur zijn en in de meeste gevallen gecombineerd moeten worden met een AC aandrijving van 220/380V. Is het bovendien wel mogelijk om deze snel en nauwkeurig genoeg aan te sturen?
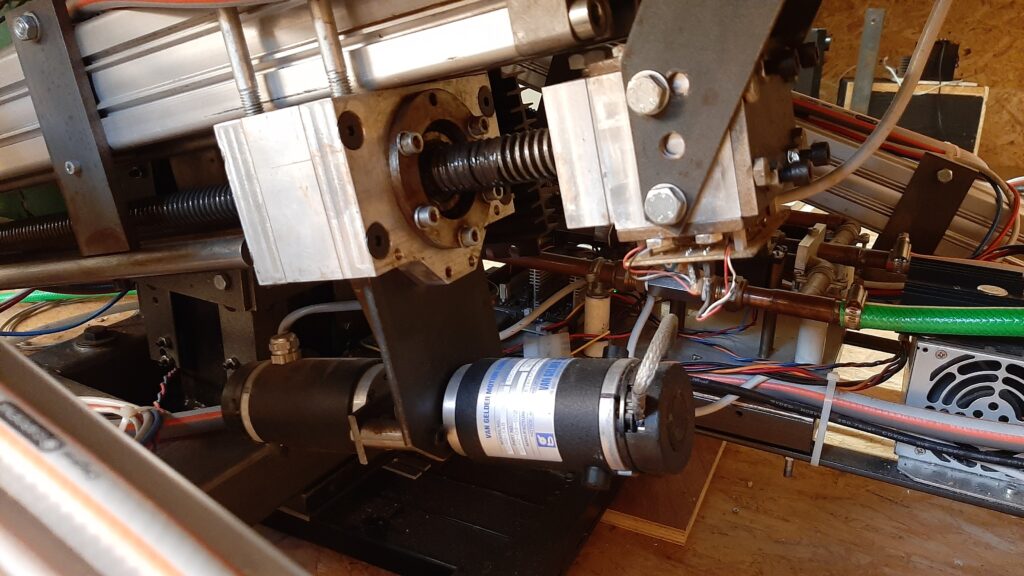
Als ik duizenden euro’s zou moeten uitgeven voor de aandrijving dan wordt het doel gemist. Zoveel mogelijk zelf doen en de kosten binnen de perken houden was een van de vereisten. Daarom had ik geen keus dan DC servo motoren te gebruiken met een eigen gemaakte vertraging en elektronica.
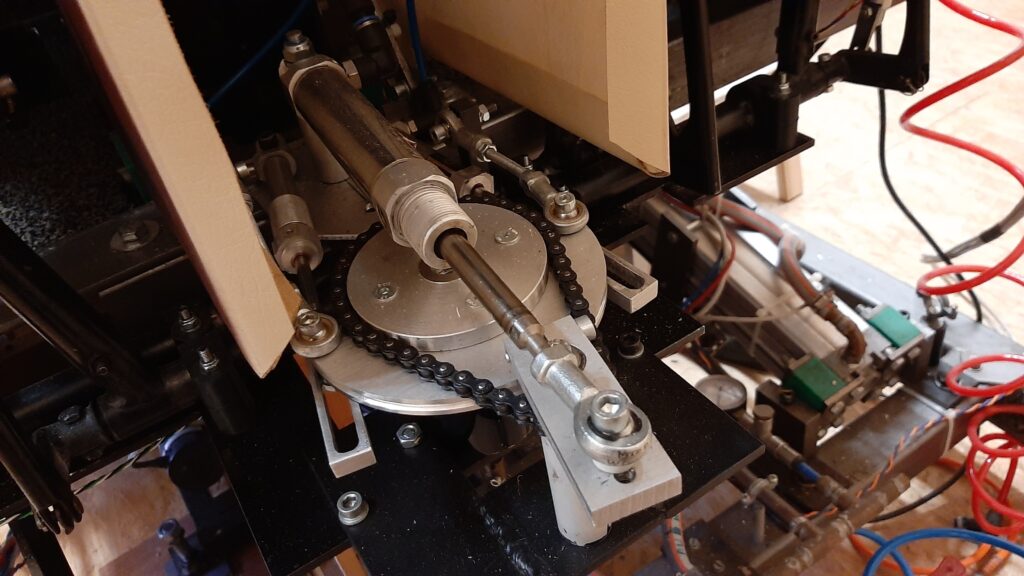
Het heeft heel wat geduurd eer ik de juiste aandrijving gevonden had. De oplossing lag ultiem in een hybride aandrijving: Pneumatica gecombineerd met servo motoren. De cilinders kunnen het zwaar gewicht van de cockpit aansturen en de servo motoren de snelheid en nauwkeurigheid.
The question I had to ask myself was: How can I move 2 people with an average weight of 80 kilograms, and a cockpit frame of around 150kg smoothly and quickly enough? We had several options:
Using hydraulics was a possibility, but I am too inexperienced with this and they are too expensive anyways. Pneumatics on the other hand are powerful enough, but they have way too much delay.
Electric motors with a heavy transmission gearbox could work, but these as well are too expensive and are mostly driven by a voltage of 220/380 V.
If I were to spend thousands of euro’s just to drive the motion I would miss my goal, which was to do as much as possible myself while keeping the costs at a minimum.
Ultimately to achieve my goal I needed to use DC servo motors with a self made gearbox and electronics. It took a while before I figured out just the right drive. The solution was to use a hybrid, Pneumatic/Servo motor. The pneumatic cylinders could handle the heavy weight and the servo motor could control the speed and accuracy.